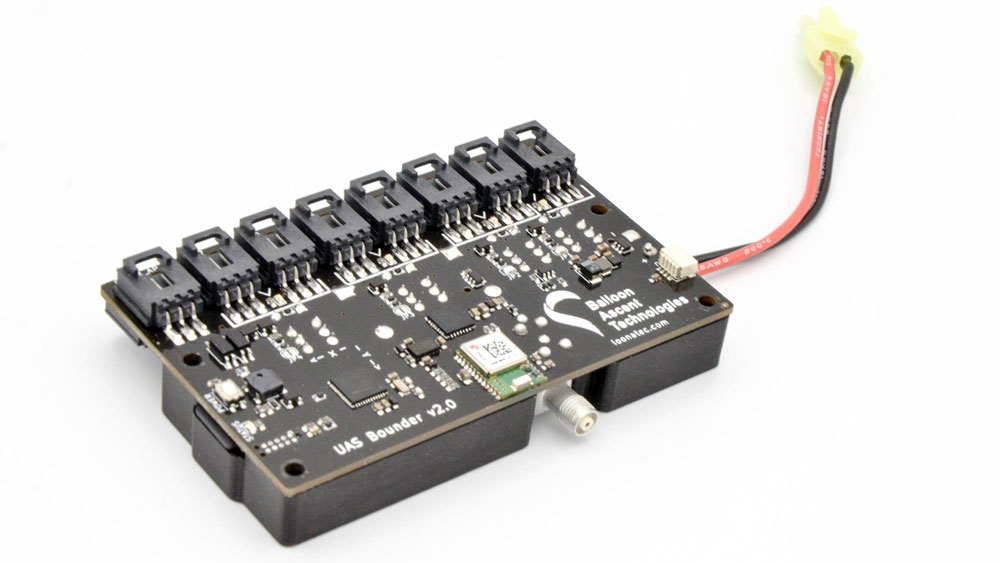

The UAS Bounder is an independent flight termination system (FTS) for Unmanned Aircraft Systems (UAS) that ensures the UAS always remains inside of the operational volume. If the Bounder detects that a range violation is eminent then it safely terminates the flight by taking control of the UAS’s motors and servos to perform a rapid landing.
The Bounder is completely independent of, and transparent to the autopilot system to ensure reliability. It can be used to eliminate the need for visual line-of-sight operation on authorized test ranges and permit rapid autopilot development by avoiding costly reviews after each change. It can easily be adapted to any UAS that uses standard RC servos and electronic speed controllers (ESC).
The UAS Bounder is a independent containment device for UAS. Its features include:
- Multiple activation parameters to choose from, ex: GPS geofences, accelerometer, magnetometer, and timer limits
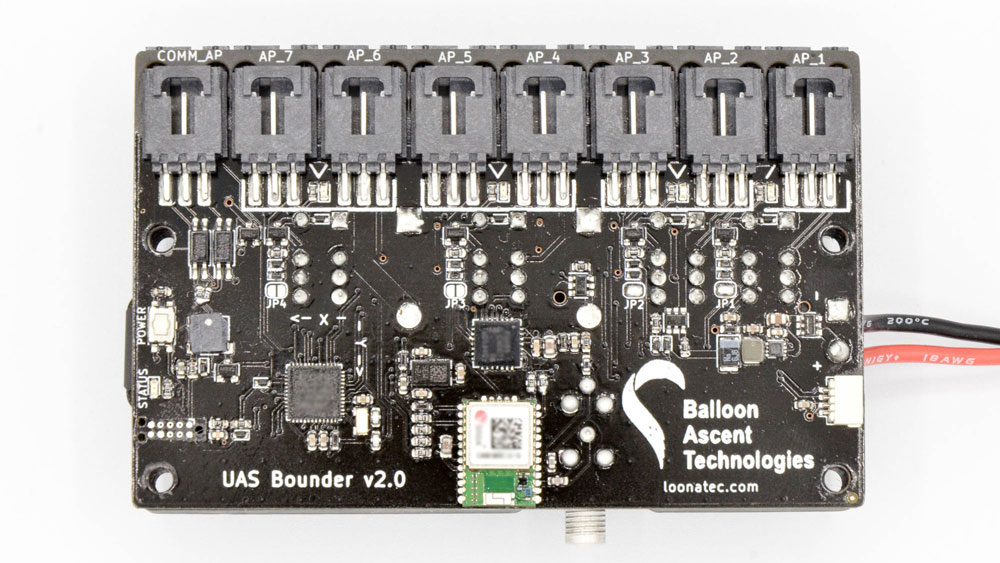
- Seven-channel Servo Routing Switch (SRS)
- Eight configurable servo PWM outputs
- Programmed via a micro-SD card prior to launch
- Independent omni-directional GPS receiver with optional external antenna
- Separate power that also provides backup power for servo motors after activation
- Ability to deploy a recovery parachute
- Ability to log GPS position, acceleration, and other flight characteristics
- Opto-isolated uni-directional autopilot interface for status and position reports
- No RF spectrum approval necessary



